
The elephant’s trunk is nothing short of a biological masterpiece—a unique appendage that showcases an intricate interplay of muscles and nerves. Comprising 17 distinct muscles, this extraordinary tool is capable of breathing, feeding, and even performing delicate tasks such as grooming and manipulating objects, all thanks to a complex network of over 60,000 facial neurons. Recent research has unveiled that a mere three “muscles” could replicate the trunk’s remarkable dexterity using a simplified model. By emphasizing minimalism within a structure renowned for its sophistication, this research highlights not only the trunk’s evolutionary ingenuity but also its potential applications in modern robotics.
The Mathematics of Movement
Central to understanding and replicating the functionality of the elephant’s trunk is a mathematical model that conceptualizes it as a slender biological filament. Researchers from Stanford University and the University of Oxford embarked on this ambitious quest, recognizing the potential for applying principles of biomechanics to robotics. This interdisciplinary collaboration focused on how to recreate the curvature and torsion found in the trunk through actuators, devices producing motion in response to an energy input. This exploration is especially significant because it links an age-old natural wonder to contemporary technological advancements.
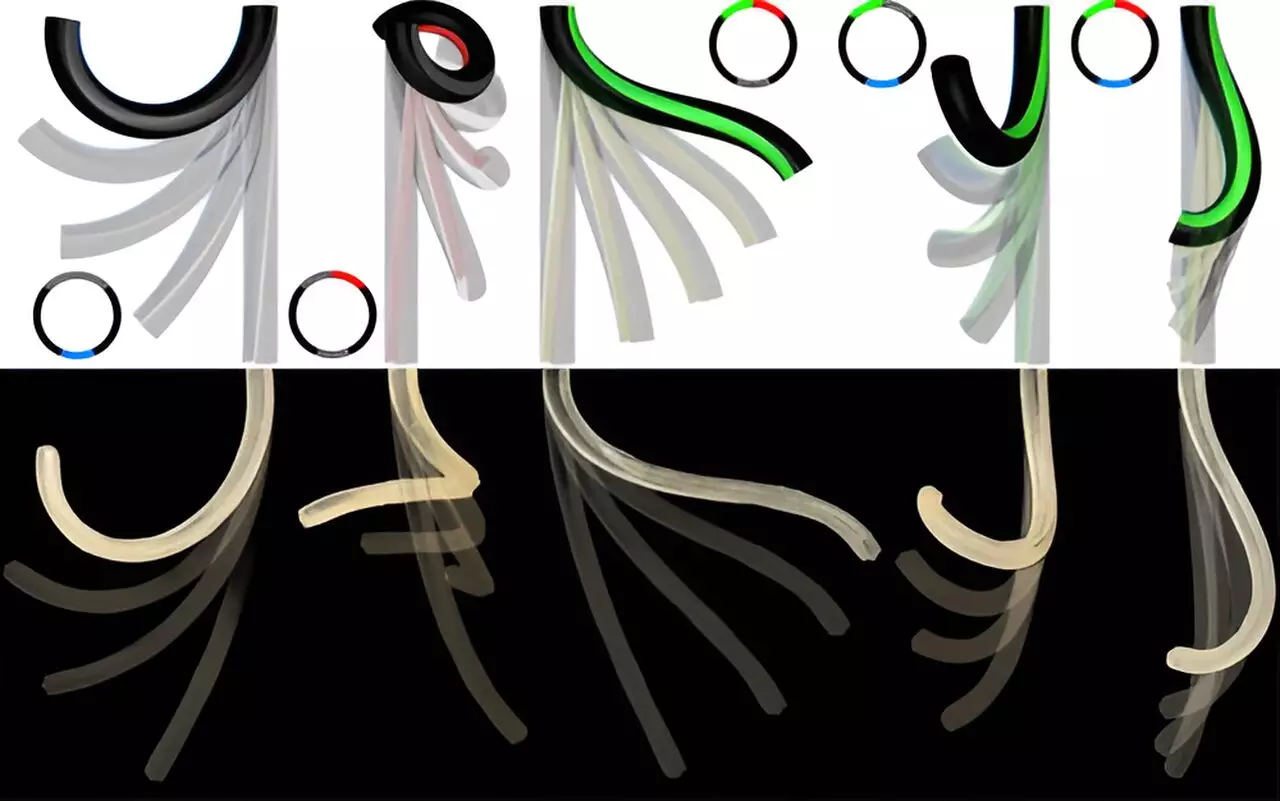
One key aspect of this endeavor is the design of the model trunk, which cleverly integrates longitudinal and helical actuators. By mimicking the primary muscle structure of an elephant’s trunk, the researchers demonstrated how such a model can enable a broader range of motion in three dimensions. The helical actuators, comparatively rare in traditional robotic designs, allow for intricate maneuvers, echoing the natural versatility seen in elephants. The implications of such a design extend well beyond curiosity; they hold promise for creating robotic systems capable of navigating complex environments.
Innovative Materials and Mechanisms
Creating a tangible version of the mathematical model involved cutting-edge materials and innovative fabrication techniques. The team turned to soft, polymer-based structures enhanced with 3D-printed liquid-crystalline elastomer fibers, which respond dynamically to heat-induced contractions. This advanced approach has redefined the capabilities of robotic arms, enabling precise control and adaptability in movements that closely mimic biological processes.
By electrically warming the embedded copper wires within each fiber, the actuators can bend, twist, and curl—demonstrating not only the trunk’s functionality but also how materials science can augment robotics. This intersection of biological insight and engineering ingenuity is not only captivating; it represents a paradigm shift in how we approach the design of robotic limbs.
Performance and Potential Applications
Upon completion of the model trunk, the researchers developed a “reachability” assessment, mapping the three-dimensional space the trunk could occupy. The results were promising, revealing an extraordinary movement envelope. With the minimal design utilizing only three actuators, the researchers discovered they could achieve a reachability cloud that allowed for expansive motion in all directions. This is particularly significant when juxtaposed against conventional robotic designs, which typically restrict movement due to excessive mechanical complexity.
Moreover, the minimal trunk’s ability to perform various sophisticated movements—like grasping objects or navigating around obstacles—suggests that it could serve as an invaluable tool in many applications, from agricultural robotics to intricate surgical procedures. It’s a striking conclusion that calls into question the notion that more complexity inherently leads to better performance.
Limitations and Future Directions
While the accomplishments of this research are impressive, it is essential to recognize potential limitations. The current model lacks the ability to elongate or shorten, which could impede its functional versatility in certain scenarios. Furthermore, how well the trunk can manage different loads remains an open question demanding further investigation. However, these limitations should not overshadow the enormous implications of the research; the findings undoubtedly lay a foundation for informing future designs in robotics and biomechanics.
The trajectory of research into the elephant trunk serves as an enlightening case study in biomimetic engineering. There is a thrilling future ahead, ripe with potential for further interplay between biology and technology, offering insights that may lead to the development of next-generation robotic systems capable of unprecedented adaptability and complexity. In an era increasingly characterized by automation and sensory-driven robotics, this work underscores the importance of looking to nature for inspiration in our engineering endeavors.